自然に学ぶ研究事例
| 第52回 最終回 | 昆虫に学ぶ環境適応性 |
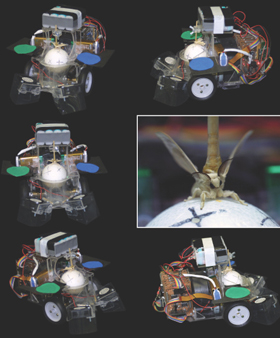
良質なシルクをとるために人によって飼育されたカイコガは、飛ぶことができず、歩いてメスを探す。カイコガの背中をロボットに固定し、歩き出すと中央のボールが回転する。その回転の方向を光学マウスのセンサーが読み取り、ロボットのタイヤに動きが伝わる。
昆虫の動きや体を手本としたロボット開発が盛んですが、昆虫を司令塔として動くユニークなロボットが試作され、昆虫の生体研究に利用されています。それは、「昆虫操作型ロボット」と名付けられた動く実験装置で、さまざまな条件下で昆虫が変化にどのように対応するのか、環境適応性を調べようというものです。
ロボットと昆虫を融合することで,、昆虫を取り巻く環境にさまざまな変化を与えることができます。たとえば、ロボットの左右のモーターの回転のバランスを崩してしまえしてしまえば,、操縦者である昆虫の意図しない運動が起こり、進もうとする方向とは異なる方へ向かってしまいます。あるいは、昆虫の動きに対してロボットがわずかに遅れて動作すると、昆虫はどのような反応をみせるのでしょう。昆虫が十分な適応能力を持つのであれば,、このような運動の変化を知覚し、適切な補正を行うことが考えられます。
現在、カイコガのオスがメスの性フェロモンの匂い情報に反応し、歩いてメスを探す習性本能行動を利用した実験が行われています。匂いは空気中に分散して存在するため、カイコガは、匂い源を探すときに直進、ジグザグ、回転という、まるで脳内にプログラムされたようなパターン行動行動パターンを示しますとります。このパターンをくり返しながら、徐々に匂い源に近づいていくのです。ロボットの基本設計はカイコガの動きを忠実に再現しますが、モーターバランスを変えて一方向への動きだけ大きくするという実験では、カイコガがは直ちにそれを補正する動きをして、高い確率で目的の場所へたどり着けることが明らかにされました。
こうした、昆虫が生きるために身に着けた適応能力を、さまざまな条件下で検証し、ロボット開発に生かそうというのが研究目的の1つです。並行して、昆虫の脳のメカニズム研究も行われています。微小な神経回路のなかで、どのように情報が処理されているのか…。研究が進んで、昆虫脳モデルのICチップが開発されれば、昆虫のように環境の変化にも柔軟に対応できるマイクロロボットが誕生するかもしれないのです。
 |
安藤規泰 助教 東京大学 先端科学技術研究センター 堕ちない安全な飛行機をつくりたい |
