English
中文
サステナビリティサイト
サステナビリティレポート2023
報告対象期間2022年4月~ 2023年3月
(一部更新情報あり)
PDFダウンロード
サステナビリティレポート2023トップ
トップメッセージ
長期ビジョンとESG経営
サステナビリティ貢献製品
マテリアリティ(
マテリアリティ(
ガバナンス(内部統制)
)
/
マテリアリティ(
DX
)
/
マテリアリティ(
環境
)
/
マテリアリティ(
人的資本
)
/
マテリアリティ(
融合(イノベーション)
)
)
社会課題解決を支える取り組み
ESG経営を支える基盤
PDFダウンロード
サステナビリティレポート 2023サイトマップ
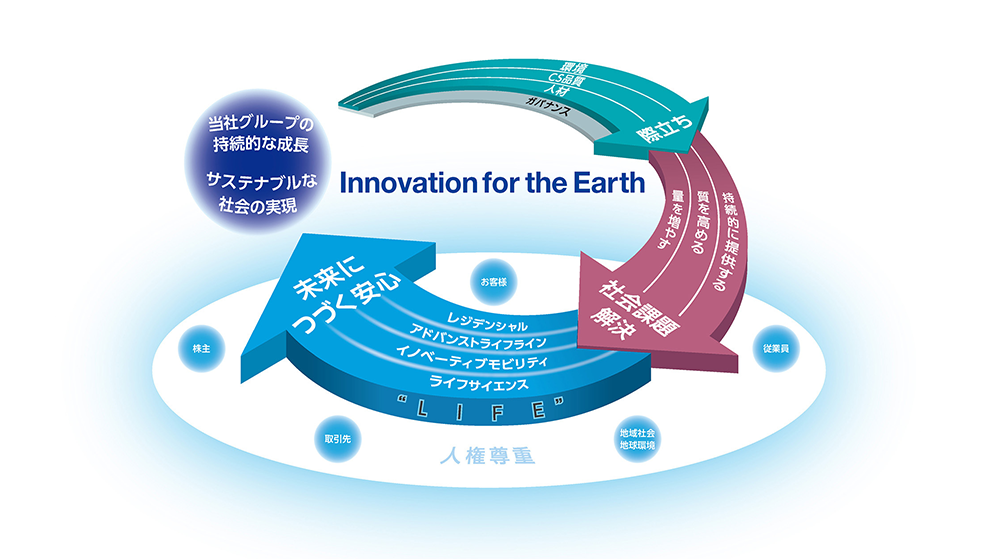
サステナブルな社会の実現に向けて、
LIFEの基盤を支え、“未来につづく安心”を創造します。
トップメッセージ
更新情報
2024年2月8日
CDP「気候変動」および「水セキュリティ」分野の情報開示においてAスコアを獲得
2024年2月1日
積水化学グループの人権方針を改定しました。
2024年2月1日
積水化学グループの調達基本方針を改定しました。
2023年12月18日
ESG投資指標「Dow Jones Sustainability World Index」の構成銘柄に12年連続で選定
2023年10月16日
2023年度「積水化学 自然に学ぶものづくり研究助成プログラム」助成テーマについて
過去の更新情報
長期ビジョンとESG経営
ESGを経営の中心において、サステナブルな社会の実現と当社グループの持続的な成長の両立を目指します。
マテリアリティ
サステナビリティ
貢献製品
自然、社会環境の課題解決に貢献する製品の創出
ガバナンス
(内部統制)
ステークホルダーからの信頼を持続させるための基盤
DX
持続的な成長を実現、加速、下支えするドライバー
環境
気候変動、水リスク、資源循環、生物多様性を重要課題とした取り組み
人的資本
社会課題解決に持続的に貢献するための原動力
融合
(イノベーション)
“未来につづく安心”の創造を目指してイノベーションを加速
社会課題解決を支える取り組み
知的財産戦略、CS品質の磨き上げ、サステナビリティ貢献製品創出・拡大に向けて
ESG経営を支える基盤
コーポレート・ガバナンス、ステークホルダー・エンゲージメント、人権尊重、責任ある調達
積水化学グループ概要
主な事業内容、製品、サービスとグローバル展開(地域別会社数、従業員数)
積水化学グループの各方針
人権、環境経営、CS品質経営、人材、安全、情報セキュリティ、社会貢献活動、調達の基本の各方針
賛同・支持するイニシアチブと参画団体
GRI内容索引
第三者保証報告書
社外からの評価
バックナンバー
TCFDの提言に基づいた情報開示 / TNFDガイドに準拠した情報開示
PDFダウンロード
積水化学グループのサステナビリティに関する各種データをPDFで掲載しております。
サステナビリティレポート2023
全ページ一括ダウンロード
(pdf:19.76MB)
パフォーマンス・データ集
ダウンロード
(pdf:3.76MB)
その他の冊子
積水化学が発行している会社案内・小冊子についてはこちら
編集方針
本レポートの編集方針を掲載しております
報告対象範囲
本レポートの報告対象範囲を掲載しております
当社のサステナビリティに関する問い合わせはこちら